

本项目用到的东西
硬件组件
ESP32 开发板 – 开发者版x1
惯性测量单元 (IMU)(6 自由度)x1
MG90伺服x8
软件应用程序和在线服务
Arduino IDE
手动工具和制造机器
3D 打印机(通用)
烙铁(通用)
开始

该项目使用 Gleb Devyatkin 的软件。此代码专为使用 3 个伺服系统的腿设计。这些伺服系统被命名为 Alpha、Beta 和 Gamma。阿尔法伺服用于将整条腿向外抬起。Beta 伺服是髋关节,Gamma 伺服是膝关节。这个机器人只使用 Beta 和 Gamma。
3D打印
我所做的更改之一是在接头和固定装置上使用螺钉,而不是使用耗材。此外,我想通过或多或少地将其打印为单件来“清理”身体。我在机身底部设计了一个开口来固定电池组并提供对电子设备的访问。

在构建板上将主体旋转 180 度,使开口位于顶部并使用支撑进行打印。Body_lid 打印时没有支撑。主体需要四个 M3 x 4mm 长 x 4mm OD 插入物被压入每个标签中。

还将两个 M2.5 x 3 毫米长 x 3.5 毫米外径插件添加到 Body_Lid 中,并使用 M2.5 x 4 毫米螺钉拧上双 18650 电池座。盖子使用四个 M3 沉头(平头)6 毫米螺钉固定在机身上。
有 8 个孔将臀部固定在身体上。使用 3 毫米丝锥为 20 毫米 M3 螺钉创建螺纹,用于将臀部固定到身体上。打印臀部时,需要两个 HipLeft 和两个 HipRight。这同样适用于 HamLeft 和 HamRight。
我没有改变小腿,所以你需要用 3 毫米钻头钻出连接到火腿的孔。使用带锁紧螺母的 M3 螺钉将小腿连接到火腿。不要拧得太紧。刀柄应自由旋转,没有任何横向间隙。
肌腱是通过展开中等大小的回形针创建的。它们使用 3D 打印的销钉固定在适当的位置。

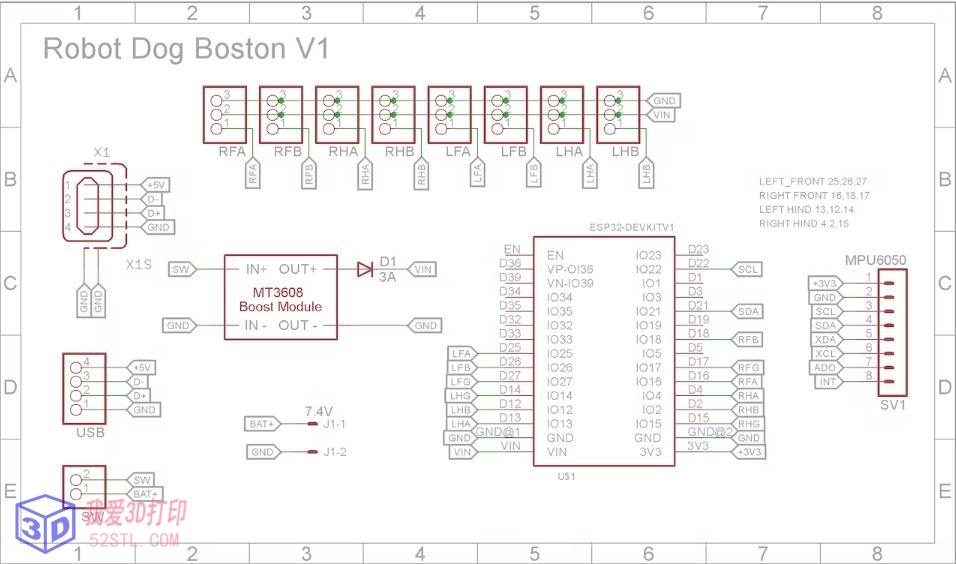
印刷电路板
在设计 PCB 时,我选择使用 USB Type B 插座,而不是尝试通过外壳访问 ESP32 开发板上的 mini USB。USB B 型插座比表面安装到 PCB 上的迷你 USB 插座要承受更多的惩罚。我剪断了一根旧的迷你 USB 电缆,并在末端添加了一个 4 针杜邦连接器,以便可以将其插入 PCB。
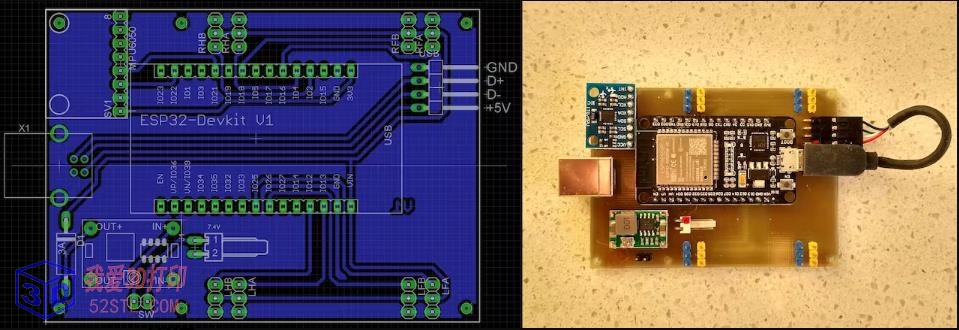
确保在将 DC-DC 稳压器连接到 PCB 之前将其设置为输出 5V。使用四个 M2 x 4mm 螺钉将 PCB 固定到位。
如果您希望将电路板商业化,或者您可以像我一样自己制作,Eagle 文件已包含在内。我使用了碳粉方法。
软件
该代码是可从GitHub下载下载的“现成”软件。由于我的错误导致伺服连接错误,您需要先修改 config_small.h。第 37、57、77 和 97 行包含 Alpha、Beta 和 Gamma 伺服系统分别连接的 ESP32 引脚。您需要为每条腿交换第一个和第三个数字。
有代码可以访问 INA219 电流感应板,但它没有被使用,所以我没有费心将它添加到我的重新设计中。

没有回复内容