
该 遥控不需要单个螺栓或螺母。您只需打印零件,将它们放在一起,连接电机和电子设备,就可以进行战斗了。它显示出出色的越野能力。该坦克的两个履带中的每一个都印在单件上,因此无需组装硬件。
本视频中显示的机器由安装在300孔迷你面包板上的 Picaxe 20M2 微控制器供电。还有一个H桥电机驱动器、一个 IR 传感器、几个电阻器和电容器,以及一跨接电缆。该坦克使用常规的电视遥控器进行操作。

3D 打印零件清单:
红外线遥控坦克-3d打印模型stl下载 点击下载
打印时间是近似值,基于 Simplify3D 软件提供的估计。
| 数量 | 文件名 | 打印时间(分钟) | 总打印时间(分钟) |
|---|---|---|---|
| 2 | 坦克轨道.stl | 204 | 408 |
| 1 | tank_left_front_wheel.stl | 86 | 86 |
| 1 | tank_left_back_wheel.stl | 77 | 77 |
| 1 | tank_right_front_wheel.stl | 86 | 86 |
| 1 | tank_right_back_wheel.stl | 77 | 77 |
| 2 | tank_front_hubcap.stl | 10 | 20 |
| 2 | tank_back_hubcap.stl | 11 | 22 |
| 1 | tank_left_outer_rail.stl | 51 | 51 |
| 1 | tank_left_inner_rail.stl | 41 | 41 |
| 1 | tank_right_outer_rail.stl | 51 | 51 |
| 1 | tank_right_inner_rail.stl | 41 | 41 |
| 1 | tank_frame.stl | 105 | 105 |
| 2 | tank_motorholder.stl | 40 | 80 |
| 2 | tank_adapter.stl | 10 | 20 |
| 1 | tank_batteryholder.stl | 91 | 91 |
| 1 | tank_cover.stl | 166 | 166 |
| 1 | tank_cannon.stl | 61 | 61 |
总打印部件:22
总打印时间(大约):1,483 分钟。(24 小时 43 分钟)
电机和电池:
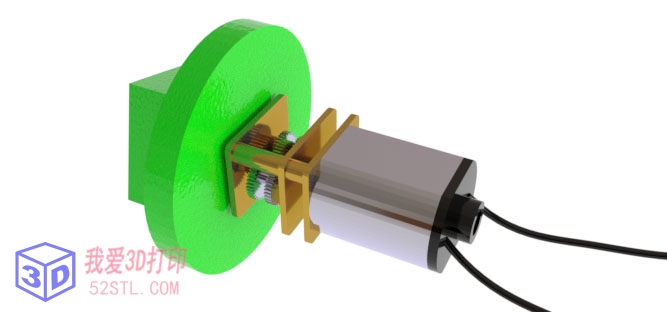
该油箱使用此处显示的两 (2) 个 DC 6V 30RPM 微型减速齿轮电机。

需要 7 节 AA 电池:3 节用于为逻辑供电,4 节用于运行电机。
组装说明:
第 1 步:
将电机轴插入适配器。一直推入。将电线连接到电机端子。
第 2 步:
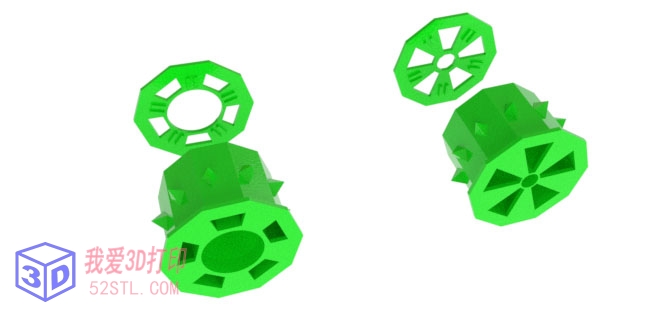
将轮毂盖 卡入各自的前轮和后轮上 。轮辐进入轮毂盖的凹槽。
第 3 步:
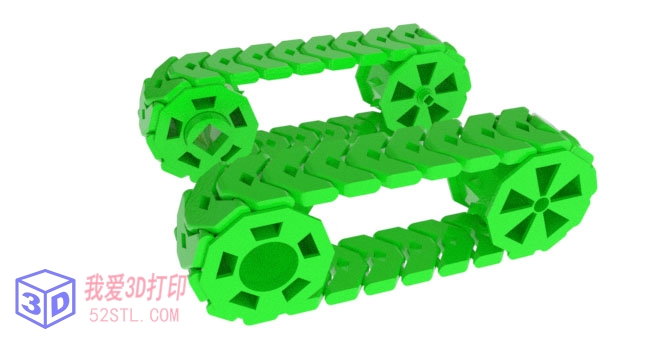
如图所示,将履带安装在车轮上。
第 4 步:
将轨道的内半部和外半部 卡在一起,轮子和轨道夹在中间。
第 5 步:
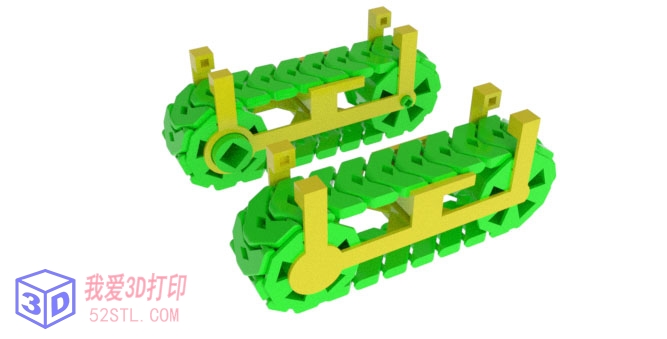
将导轨安装到框架上。框架的方钉进入导轨上的方孔。将连接有适配器的电机放入车架底部的电机室中,然后将适配器插入前轮的方孔中。用电机支架固定电机。将电机线穿过框架上的圆孔。
第 6 步:
准备好电池座。用导电材料(如箔片)在电池盒的侧面划线。我们使用粘性铜箔胶带,但也可以使用带有一些胶水的普通铝箔。将电线穿过电池座侧面的三角形孔。有两个独立的腔室:一个用于 3 节 AA 电池,另一个用于 4 节 AA 电池。前者为微控制器供电,后者为电机供电。一切准备就绪后,将电池座安装到导轨上,如图所示。

第 7 步:
将带有电子设备的面包板放在框架顶部,连接电机和电源。安装盖板。盖子侧面的双钉必须跨在框架的横梁上。
第 8 步:
安装大炮。
电子说明
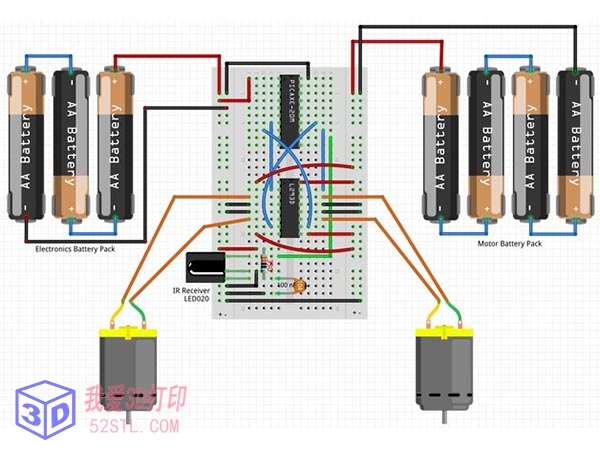
此处显示的遥控坦克使用 Picaxe 20M 芯片作为其微控制器,L293D H 桥为电机提供双向电流,标准红外接收器(可在网上以部件号 LED020 购买),330Ω电阻和一个100nF的陶瓷电容。所有这些组件都放置在一个300孔的迷你面包板上,如下所示。控制此型号需要使用Sony电视遥控器。
点击下面的图片放大。
说明:
面包板的左侧电源总线用于电子设备,应连接到 3 电池组 (4.5v),右侧电源总线用于为电机供电,应连接到 4 电池组 (6v)。左右接地母线应相互连接。
红外接收器需要放置在面包板上,其“凸起”指向左侧。它的底脚通过电阻器连接到电源(左总线),并通过电容器连接到地。中腿直接接地。上端是馈入 Picaxe 的 B.6 输入(引脚 12)的数据信号。
Picaxe 芯片需要分别通过引脚 1 和 20 连接到电源和接地(左侧总线),如图所示。
H 桥由左右两部分组成,分别控制一个电机。每一半必须通过外部引脚 1、8、9 和 16 连接到电源(右侧总线),并通过中间引脚 4、5、12 和 13 接地。
电机连接到与接地引脚相邻的 H 桥引脚。电机 1 连接到引脚 3 和 6,电机 2 连接到引脚 11 和 14。
驱动电机的 H 桥电流通过引脚 2 和 7(电机 1)以及引脚 10 和 15(电机 2)控制。这些引脚必须分别连接到 Picaxe 的输出 C.3 和 B.4(引脚 7 和 14)以及 C.2 和 B.5(引脚 8 和 13)。
Picaxe 底层代码如下:
做
irin b.6, b1
如果 b1 = 116 then ‘ 前进
高 c.3
高 c.2
低 b.4
低 b.5
elseif b1 = 51 then ‘ 右
高 c.3
低 c.2
低 b.4
高 b.5
elseif b1 = 52 then ‘ 左
低 c.3
高 c.2
高 b.4
低 b.5
elseif b1 = 101 then ‘ 停止
低 c.3
低 c.2
低 b.4
低 b.5
elseif b1 = 117 then ‘ 反向
低 c.3
低 c.2
高 b.4
高 b.5
endif
循环
请购买模型或打赏以帮助保持该网站免费且没有烦人的广告。

